
 caojian05
caojian05
 CaoJian
5 years ago
CaoJian
5 years ago
15 changed files with 926 additions and 248 deletions
Unified View
Diff Options
-
+327 -176model_zoo/googlenet/README.md
-
+44 -10model_zoo/googlenet/eval.py
-
+19 -6model_zoo/googlenet/export.py
-
+25 -0model_zoo/googlenet/mindspore_hub_conf.py
-
+43 -0model_zoo/googlenet/scripts/run_eval_gpu.sh
-
+24 -9model_zoo/googlenet/scripts/run_train.sh
-
+51 -0model_zoo/googlenet/scripts/run_train_gpu.sh
-
+39 -2model_zoo/googlenet/src/config.py
-
+88 -11model_zoo/googlenet/src/dataset.py
-
+11 -12model_zoo/googlenet/src/googlenet.py
-
+0 -0model_zoo/googlenet/src/lr_scheduler/__init__.py
-
+20 -0model_zoo/googlenet/src/lr_scheduler/linear_warmup.py
-
+39 -0model_zoo/googlenet/src/lr_scheduler/warmup_cosine_annealing_lr.py
-
+59 -0model_zoo/googlenet/src/lr_scheduler/warmup_step_lr.py
-
+137 -22model_zoo/googlenet/train.py
+ 327
- 176
model_zoo/googlenet/README.md
View File
| @@ -36,14 +36,8 @@ GoogleNet, a 22 layers deep network, was proposed in 2014 and won the first plac | |||||
| # [Model Architecture](#contents) | # [Model Architecture](#contents) | ||||
| The overall network architecture of GoogleNet is shown below: | |||||
| 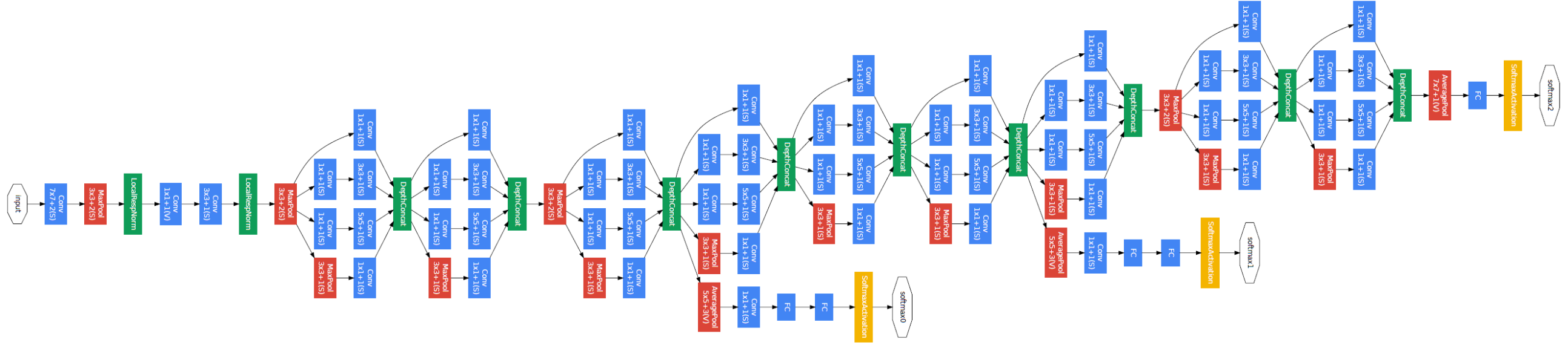 | |||||
| Specifically, the GoogleNet contains numerous inception modules, which are connected together to go deeper. In general, an inception module with dimensionality reduction consists of **1×1 conv**, **3×3 conv**, **5×5 conv**, and **3×3 max pooling**, which are done altogether for the previous input, and stack together again at output. | Specifically, the GoogleNet contains numerous inception modules, which are connected together to go deeper. In general, an inception module with dimensionality reduction consists of **1×1 conv**, **3×3 conv**, **5×5 conv**, and **3×3 max pooling**, which are done altogether for the previous input, and stack together again at output. | ||||
|  | |||||
| # [Dataset](#contents) | # [Dataset](#contents) | ||||
| @@ -52,10 +46,9 @@ Dataset used: [CIFAR-10](<http://www.cs.toronto.edu/~kriz/cifar.html>) | |||||
| - Dataset size:175M,60,000 32*32 colorful images in 10 classes | - Dataset size:175M,60,000 32*32 colorful images in 10 classes | ||||
| - Train:146M,50,000 images | - Train:146M,50,000 images | ||||
| - Test:29.3M,10,000 images | |||||
| - Test:29M,10,000 images | |||||
| - Data format:binary files | - Data format:binary files | ||||
| - Note:Data will be processed in dataset.py | |||||
| - Note:Data will be processed in src/dataset.py | |||||
| # [Features](#contents) | # [Features](#contents) | ||||
| @@ -72,7 +65,7 @@ For FP16 operators, if the input data type is FP32, the backend of MindSpore wil | |||||
| - Hardware(Ascend/GPU) | - Hardware(Ascend/GPU) | ||||
| - Prepare hardware environment with Ascend or GPU processor. If you want to try Ascend , please send the [application form](https://obs-9be7.obs.cn-east-2.myhuaweicloud.com/file/other/Ascend%20Model%20Zoo%E4%BD%93%E9%AA%8C%E8%B5%84%E6%BA%90%E7%94%B3%E8%AF%B7%E8%A1%A8.docx) to ascend@huawei.com. Once approved, you can get the resources. | - Prepare hardware environment with Ascend or GPU processor. If you want to try Ascend , please send the [application form](https://obs-9be7.obs.cn-east-2.myhuaweicloud.com/file/other/Ascend%20Model%20Zoo%E4%BD%93%E9%AA%8C%E8%B5%84%E6%BA%90%E7%94%B3%E8%AF%B7%E8%A1%A8.docx) to ascend@huawei.com. Once approved, you can get the resources. | ||||
| - Framework | - Framework | ||||
| - [MindSpore](http://10.90.67.50/mindspore/archive/20200506/OpenSource/me_vm_x86/) | |||||
| - [MindSpore](https://www.mindspore.cn/install/en) | |||||
| - For more information, please check the resources below: | - For more information, please check the resources below: | ||||
| - [MindSpore tutorials](https://www.mindspore.cn/tutorial/zh-CN/master/index.html) | - [MindSpore tutorials](https://www.mindspore.cn/tutorial/zh-CN/master/index.html) | ||||
| - [MindSpore API](https://www.mindspore.cn/api/zh-CN/master/index.html) | - [MindSpore API](https://www.mindspore.cn/api/zh-CN/master/index.html) | ||||
| @@ -83,16 +76,45 @@ For FP16 operators, if the input data type is FP32, the backend of MindSpore wil | |||||
| After installing MindSpore via the official website, you can start training and evaluation as follows: | After installing MindSpore via the official website, you can start training and evaluation as follows: | ||||
| ```python | |||||
| # run training example | |||||
| python train.py > train.log 2>&1 & | |||||
| - runing on Ascend | |||||
| # run distributed training example | |||||
| sh scripts/run_train.sh rank_table.json | |||||
| ```python | |||||
| # run training example | |||||
| python train.py > train.log 2>&1 & | |||||
| # run distributed training example | |||||
| sh scripts/run_train.sh rank_table.json | |||||
| # run evaluation example | |||||
| python eval.py > eval.log 2>&1 & | |||||
| OR | |||||
| sh run_eval.sh | |||||
| ``` | |||||
| For distributed training, a hccl configuration file with JSON format needs to be created in advance. | |||||
| Please follow the instructions in the link below: | |||||
| https://gitee.com/mindspore/mindspore/tree/master/model_zoo/utils/hccl_tools. | |||||
| - running on GPU | |||||
| For running on GPU, please change `device_target` from `Ascend` to `GPU` in configuration file src/config.py | |||||
| ```python | |||||
| # run training example | |||||
| export CUDA_VISIBLE_DEVICES=0 | |||||
| python train.py > train.log 2>&1 & | |||||
| # run distributed training example | |||||
| sh scripts/run_train_gpu.sh 8 0,1,2,3,4,5,6,7 | |||||
| # run evaluation example | |||||
| python eval.py --checkpoint_path=[CHECKPOINT_PATH] > eval.log 2>&1 & | |||||
| OR | |||||
| sh run_eval_gpu.sh [CHECKPOINT_PATH] | |||||
| ``` | |||||
| # run evaluation example | |||||
| python eval.py > eval.log 2>&1 & OR sh run_eval.sh | |||||
| ``` | |||||
| @@ -106,109 +128,168 @@ python eval.py > eval.log 2>&1 & OR sh run_eval.sh | |||||
| ├── googlenet | ├── googlenet | ||||
| ├── README.md // descriptions about googlenet | ├── README.md // descriptions about googlenet | ||||
| ├── scripts | ├── scripts | ||||
| │ ├──run_train.sh // shell script for distributed | |||||
| │ ├──run_eval.sh // shell script for evaluation | |||||
| │ ├──run_train.sh // shell script for distributed on Ascend | |||||
| │ ├──run_train_gpu.sh // shell script for distributed on GPU | |||||
| │ ├──run_eval.sh // shell script for evaluation on Ascend | |||||
| │ ├──run_eval_gpu.sh // shell script for evaluation on GPU | |||||
| ├── src | ├── src | ||||
| │ ├──dataset.py // creating dataset | │ ├──dataset.py // creating dataset | ||||
| │ ├──googlenet.py // googlenet architecture | │ ├──googlenet.py // googlenet architecture | ||||
| │ ├──config.py // parameter configuration | │ ├──config.py // parameter configuration | ||||
| ├── train.py // training script | ├── train.py // training script | ||||
| ├── eval.py // evaluation script | ├── eval.py // evaluation script | ||||
| ├── export.py // export checkpoint files into geir/onnx | |||||
| ├── export.py // export checkpoint files into air/onnx | |||||
| ``` | ``` | ||||
| ## [Script Parameters](#contents) | ## [Script Parameters](#contents) | ||||
| ```python | |||||
| Major parameters in train.py and config.py are: | |||||
| --data_path: The absolute full path to the train and evaluation datasets. | |||||
| --epoch_size: Total training epochs. | |||||
| --batch_size: Training batch size. | |||||
| --lr_init: Initial learning rate. | |||||
| --num_classes: The number of classes in the training set. | |||||
| --weight_decay: Weight decay value. | |||||
| --image_height: Image height used as input to the model. | |||||
| --image_width: Image width used as input the model. | |||||
| --pre_trained: Whether training from scratch or training based on the | |||||
| pre-trained model.Optional values are True, False. | |||||
| --device_target: Device where the code will be implemented. Optional values | |||||
| are "Ascend", "GPU". | |||||
| --device_id: Device ID used to train or evaluate the dataset. Ignore it | |||||
| when you use run_train.sh for distributed training. | |||||
| --checkpoint_path: The absolute full path to the checkpoint file saved | |||||
| after training. | |||||
| --onnx_filename: File name of the onnx model used in export.py. | |||||
| --geir_filename: File name of the geir model used in export.py. | |||||
| ``` | |||||
| Parameters for both training and evaluation can be set in config.py | |||||
| - config for GoogleNet, CIFAR-10 dataset | |||||
| ```python | |||||
| 'pre_trained': 'False' # whether training based on the pre-trained model | |||||
| 'nump_classes': 10 # the number of classes in the dataset | |||||
| 'lr_init': 0.1 # initial learning rate | |||||
| 'batch_size': 128 # training batch size | |||||
| 'epoch_size': 125 # total training epochs | |||||
| 'momentum': 0.9 # momentum | |||||
| 'weight_decay': 5e-4 # weight decay value | |||||
| 'buffer_size': 10 # buffer size | |||||
| 'image_height': 224 # image height used as input to the model | |||||
| 'image_width': 224 # image width used as input to the model | |||||
| 'data_path': './cifar10' # absolute full path to the train and evaluation datasets | |||||
| 'device_target': 'Ascend' # device running the program | |||||
| 'device_id': 4 # device ID used to train or evaluate the dataset. Ignore it when you use run_train.sh for distributed training | |||||
| 'keep_checkpoint_max': 10 # only keep the last keep_checkpoint_max checkpoint | |||||
| 'checkpoint_path': './train_googlenet_cifar10-125_390.ckpt' # the absolute full path to save the checkpoint file | |||||
| 'onnx_filename': 'googlenet.onnx' # file name of the onnx model used in export.py | |||||
| 'geir_filename': 'googlenet.geir' # file name of the geir model used in export.py | |||||
| ``` | |||||
| ## [Training Process](#contents) | ## [Training Process](#contents) | ||||
| ### Training | ### Training | ||||
| ``` | |||||
| python train.py > train.log 2>&1 & | |||||
| ``` | |||||
| The python command above will run in the background, you can view the results through the file `train.log`. | |||||
| - running on Ascend | |||||
| ``` | |||||
| python train.py > train.log 2>&1 & | |||||
| ``` | |||||
| The python command above will run in the background, you can view the results through the file `train.log`. | |||||
| After training, you'll get some checkpoint files under the script folder by default. The loss value will be achieved as follows: | |||||
| ``` | |||||
| # grep "loss is " train.log | |||||
| epoch: 1 step: 390, loss is 1.4842823 | |||||
| epcoh: 2 step: 390, loss is 1.0897788 | |||||
| ... | |||||
| ``` | |||||
| The model checkpoint will be saved in the current directory. | |||||
| - running on GPU | |||||
| ``` | |||||
| export CUDA_VISIBLE_DEVICES=0 | |||||
| python train.py > train.log 2>&1 & | |||||
| ``` | |||||
| The python command above will run in the background, you can view the results through the file `train.log`. | |||||
| After training, you'll get some checkpoint files under the folder `./ckpt_0/` by default. | |||||
| After training, you'll get some checkpoint files under the script folder by default. The loss value will be achieved as follows: | |||||
| ``` | |||||
| # grep "loss is " train.log | |||||
| epoch: 1 step: 390, loss is 1.4842823 | |||||
| epcoh: 2 step: 390, loss is 1.0897788 | |||||
| ... | |||||
| ``` | |||||
| The model checkpoint will be saved in the current directory. | |||||
| ### Distributed Training | ### Distributed Training | ||||
| ``` | |||||
| sh scripts/run_train.sh rank_table.json | |||||
| ``` | |||||
| The above shell script will run distribute training in the background. You can view the results through the file `train_parallel[X]/log`. The loss value will be achieved as follows: | |||||
| ``` | |||||
| # grep "result: " train_parallel*/log | |||||
| train_parallel0/log:epoch: 1 step: 48, loss is 1.4302931 | |||||
| train_parallel0/log:epcoh: 2 step: 48, loss is 1.4023874 | |||||
| ... | |||||
| train_parallel1/log:epoch: 1 step: 48, loss is 1.3458025 | |||||
| train_parallel1/log:epcoh: 2 step: 48, loss is 1.3729336 | |||||
| ... | |||||
| ... | |||||
| ``` | |||||
| - running on Ascend | |||||
| ``` | |||||
| sh scripts/run_train.sh rank_table.json | |||||
| ``` | |||||
| The above shell script will run distribute training in the background. You can view the results through the file `train_parallel[X]/log`. The loss value will be achieved as follows: | |||||
| ``` | |||||
| # grep "result: " train_parallel*/log | |||||
| train_parallel0/log:epoch: 1 step: 48, loss is 1.4302931 | |||||
| train_parallel0/log:epcoh: 2 step: 48, loss is 1.4023874 | |||||
| ... | |||||
| train_parallel1/log:epoch: 1 step: 48, loss is 1.3458025 | |||||
| train_parallel1/log:epcoh: 2 step: 48, loss is 1.3729336 | |||||
| ... | |||||
| ... | |||||
| ``` | |||||
| - running on GPU | |||||
| ``` | |||||
| sh scripts/run_train_gpu.sh 8 0,1,2,3,4,5,6,7 | |||||
| ``` | |||||
| The above shell script will run distribute training in the background. You can view the results through the file `train/train.log`. | |||||
| ## [Evaluation Process](#contents) | ## [Evaluation Process](#contents) | ||||
| ### Evaluation | ### Evaluation | ||||
| Before running the command below, please check the checkpoint path used for evaluation. Please set the checkpoint path to be the absolute full path, e.g., "username/googlenet/train_googlenet_cifar10-125_390.ckpt". | |||||
| ``` | |||||
| python eval.py > eval.log 2>&1 & | |||||
| OR | |||||
| sh scripts/run_eval.sh | |||||
| ``` | |||||
| The above python command will run in the background. You can view the results through the file "eval.log". The accuracy of the test dataset will be as follows: | |||||
| ``` | |||||
| # grep "accuracy: " eval.log | |||||
| accuracy: {'acc': 0.934} | |||||
| ``` | |||||
| Note that for evaluation after distributed training, please set the checkpoint_path to be the last saved checkpoint file such as "username/googlenet/train_parallel0/train_googlenet_cifar10-125_48.ckpt". The accuracy of the test dataset will be as follows: | |||||
| ``` | |||||
| # grep "accuracy: " dist.eval.log | |||||
| accuracy: {'acc': 0.9217} | |||||
| ``` | |||||
| - evaluation on CIFAR-10 dataset when running on Ascend | |||||
| Before running the command below, please check the checkpoint path used for evaluation. Please set the checkpoint path to be the absolute full path, e.g., "username/googlenet/train_googlenet_cifar10-125_390.ckpt". | |||||
| ``` | |||||
| python eval.py > eval.log 2>&1 & | |||||
| OR | |||||
| sh scripts/run_eval.sh | |||||
| ``` | |||||
| The above python command will run in the background. You can view the results through the file "eval.log". The accuracy of the test dataset will be as follows: | |||||
| ``` | |||||
| # grep "accuracy: " eval.log | |||||
| accuracy: {'acc': 0.934} | |||||
| ``` | |||||
| Note that for evaluation after distributed training, please set the checkpoint_path to be the last saved checkpoint file such as "username/googlenet/train_parallel0/train_googlenet_cifar10-125_48.ckpt". The accuracy of the test dataset will be as follows: | |||||
| ``` | |||||
| # grep "accuracy: " dist.eval.log | |||||
| accuracy: {'acc': 0.9217} | |||||
| ``` | |||||
| - evaluation on CIFAR-10 dataset when running on GPU | |||||
| Before running the command below, please check the checkpoint path used for evaluation. Please set the checkpoint path to be the absolute full path, e.g., "username/googlenet/train/ckpt_0/train_googlenet_cifar10-125_390.ckpt". | |||||
| ``` | |||||
| python eval.py --checkpoint_path=[CHECKPOINT_PATH] > eval.log 2>&1 & | |||||
| ``` | |||||
| The above python command will run in the background. You can view the results through the file "eval.log". The accuracy of the test dataset will be as follows: | |||||
| ``` | |||||
| # grep "accuracy: " eval.log | |||||
| accuracy: {'acc': 0.930} | |||||
| ``` | |||||
| OR, | |||||
| ``` | |||||
| sh scripts/run_eval_gpu.sh [CHECKPOINT_PATH] | |||||
| ``` | |||||
| The above python command will run in the background. You can view the results through the file "eval/eval.log". The accuracy of the test dataset will be as follows: | |||||
| ``` | |||||
| # grep "accuracy: " eval/eval.log | |||||
| accuracy: {'acc': 0.930} | |||||
| ``` | |||||
| # [Model Description](#contents) | # [Model Description](#contents) | ||||
| @@ -216,100 +297,170 @@ accuracy: {'acc': 0.9217} | |||||
| ### Evaluation Performance | ### Evaluation Performance | ||||
| | Parameters | GoogleNet | | |||||
| | -------------------------- | ----------------------------------------------------------- | | |||||
| | Model Version | Inception V1 | | |||||
| | Resource | Ascend 910 ;CPU 2.60GHz,56cores;Memory,314G | | |||||
| | uploaded Date | 06/09/2020 (month/day/year) | | |||||
| | MindSpore Version | 0.3.0-alpha | | |||||
| | Dataset | CIFAR-10 | | |||||
| | Training Parameters | epoch=125, steps=390, batch_size = 128, lr=0.1 | | |||||
| | Optimizer | SGD | | |||||
| | Loss Function | Softmax Cross Entropy | | |||||
| | outputs | probability | | |||||
| | Loss | 0.0016 | | |||||
| | Speed | 1pc: 79 ms/step; 8pcs: 82 ms/step | | |||||
| | Total time | 1pc: 63.85 mins; 8pcs: 11.28 mins | | |||||
| | Parameters (M) | 6.8 | | |||||
| | Checkpoint for Fine tuning | 43.07M (.ckpt file) | | |||||
| | Model for inference | 21.50M (.onnx file), 21.60M(.geir file) | | |||||
| | Scripts | https://gitee.com/mindspore/mindspore/tree/master/model_zoo/googlenet | | |||||
| | Parameters | Ascend | GPU | | |||||
| | -------------------------- | ----------------------------------------------------------- | ---------------------- | | |||||
| | Model Version | Inception V1 | Inception V1 | | |||||
| | Resource | Ascend 910 ;CPU 2.60GHz,56cores;Memory,314G | NV SMX2 V100-32G | | |||||
| | uploaded Date | 08/31/2020 (month/day/year) | 08/20/2020 (month/day/year) | | |||||
| | MindSpore Version | 0.7.0-alpha | 0.6.0-alpha | | |||||
| | Dataset | CIFAR-10 | CIFAR-10 | | |||||
| | Training Parameters | epoch=125, steps=390, batch_size = 128, lr=0.1 | epoch=125, steps=390, batch_size=128, lr=0.1 | | |||||
| | Optimizer | SGD | SGD | | |||||
| | Loss Function | Softmax Cross Entropy | Softmax Cross Entropy | | |||||
| | outputs | probability | probobility | | |||||
| | Loss | 0.0016 | 0.0016 | | |||||
| | Speed | 1pc: 79 ms/step; 8pcs: 82 ms/step | 1pc: 150 ms/step; 8pcs: 164 ms/step | | |||||
| | Total time | 1pc: 63.85 mins; 8pcs: 11.28 mins | 1pc: 126.87 mins; 8pcs: 21.65 mins | | |||||
| | Parameters (M) | 13.0 | 13.0 | | |||||
| | Checkpoint for Fine tuning | 43.07M (.ckpt file) | 43.07M (.ckpt file) | | |||||
| | Model for inference | 21.50M (.onnx file), 21.60M(.air file) | | | |||||
| | Scripts | [googlenet script](https://gitee.com/mindspore/mindspore/tree/r0.7/model_zoo/official/cv/googlenet) | [googlenet script](https://gitee.com/mindspore/mindspore/tree/r0.6/model_zoo/official/cv/googlenet) | | |||||
| ### Inference Performance | ### Inference Performance | ||||
| | Parameters | GoogleNet | | |||||
| | ------------------- | --------------------------- | | |||||
| | Model Version | Inception V1 | | |||||
| | Resource | Ascend 910 | | |||||
| | Uploaded Date | 06/09/2020 (month/day/year) | | |||||
| | MindSpore Version | 0.3.0-alpha | | |||||
| | Dataset | CIFAR-10, 10,000 images | | |||||
| | batch_size | 128 | | |||||
| | outputs | probability | | |||||
| | Accuracy | 1pc: 93.4%; 8pcs: 92.17% | | |||||
| | Model for inference | 21.50M (.onnx file) | | |||||
| | Parameters | Ascend | GPU | | |||||
| | ------------------- | --------------------------- | --------------------------- | | |||||
| | Model Version | Inception V1 | Inception V1 | | |||||
| | Resource | Ascend 910 | GPU | | |||||
| | Uploaded Date | 08/31/2020 (month/day/year) | 08/20/2020 (month/day/year) | | |||||
| | MindSpore Version | 0.7.0-alpha | 0.6.0-alpha | | |||||
| | Dataset | CIFAR-10, 10,000 images | CIFAR-10, 10,000 images | | |||||
| | batch_size | 128 | 128 | | |||||
| | outputs | probability | probability | | |||||
| | Accuracy | 1pc: 93.4%; 8pcs: 92.17% | 1pc: 93%, 8pcs: 92.89% | | |||||
| | Model for inference | 21.50M (.onnx file) | | | |||||
| ## [How to use](#contents) | ## [How to use](#contents) | ||||
| ### Inference | ### Inference | ||||
| If you need to use the trained model to perform inference on multiple hardware platforms, such as GPU, Ascend 910 or Ascend 310, you can refer to this [Link](https://www.mindspore.cn/tutorial/zh-CN/master/advanced_use/network_migration.html). Following the steps below, this is a simple example: | If you need to use the trained model to perform inference on multiple hardware platforms, such as GPU, Ascend 910 or Ascend 310, you can refer to this [Link](https://www.mindspore.cn/tutorial/zh-CN/master/advanced_use/network_migration.html). Following the steps below, this is a simple example: | ||||
| ``` | |||||
| # Load unseen dataset for inference | |||||
| dataset = dataset.create_dataset(cfg.data_path, 1, False) | |||||
| # Define model | |||||
| net = GoogleNet(num_classes=cfg.num_classes) | |||||
| opt = Momentum(filter(lambda x: x.requires_grad, net.get_parameters()), 0.01, | |||||
| cfg.momentum, weight_decay=cfg.weight_decay) | |||||
| loss = nn.SoftmaxCrossEntropyWithLogits(sparse=True, reduction='mean', | |||||
| is_grad=False) | |||||
| model = Model(net, loss_fn=loss, optimizer=opt, metrics={'acc'}) | |||||
| # Load pre-trained model | |||||
| param_dict = load_checkpoint(cfg.checkpoint_path) | |||||
| load_param_into_net(net, param_dict) | |||||
| net.set_train(False) | |||||
| # Make predictions on the unseen dataset | |||||
| acc = model.eval(dataset) | |||||
| print("accuracy: ", acc) | |||||
| ``` | |||||
| - Running on Ascend | |||||
| ``` | |||||
| # Set context | |||||
| context.set_context(mode=context.GRAPH_HOME, device_target=cfg.device_target) | |||||
| context.set_context(device_id=cfg.device_id) | |||||
| # Load unseen dataset for inference | |||||
| dataset = dataset.create_dataset(cfg.data_path, 1, False) | |||||
| # Define model | |||||
| net = GoogleNet(num_classes=cfg.num_classes) | |||||
| opt = Momentum(filter(lambda x: x.requires_grad, net.get_parameters()), 0.01, | |||||
| cfg.momentum, weight_decay=cfg.weight_decay) | |||||
| loss = nn.SoftmaxCrossEntropyWithLogits(sparse=True, reduction='mean', | |||||
| is_grad=False) | |||||
| model = Model(net, loss_fn=loss, optimizer=opt, metrics={'acc'}) | |||||
| # Load pre-trained model | |||||
| param_dict = load_checkpoint(cfg.checkpoint_path) | |||||
| load_param_into_net(net, param_dict) | |||||
| net.set_train(False) | |||||
| # Make predictions on the unseen dataset | |||||
| acc = model.eval(dataset) | |||||
| print("accuracy: ", acc) | |||||
| ``` | |||||
| - Running on GPU: | |||||
| ``` | |||||
| # Set context | |||||
| context.set_context(mode=context.GRAPH_HOME, device_target="GPU") | |||||
| # Load unseen dataset for inference | |||||
| dataset = dataset.create_dataset(cfg.data_path, 1, False) | |||||
| # Define model | |||||
| net = GoogleNet(num_classes=cfg.num_classes) | |||||
| opt = Momentum(filter(lambda x: x.requires_grad, net.get_parameters()), 0.01, | |||||
| cfg.momentum, weight_decay=cfg.weight_decay) | |||||
| loss = nn.SoftmaxCrossEntropyWithLogits(sparse=True, reduction='mean', | |||||
| is_grad=False) | |||||
| model = Model(net, loss_fn=loss, optimizer=opt, metrics={'acc'}) | |||||
| # Load pre-trained model | |||||
| param_dict = load_checkpoint(args_opt.checkpoint_path) | |||||
| load_param_into_net(net, param_dict) | |||||
| net.set_train(False) | |||||
| # Make predictions on the unseen dataset | |||||
| acc = model.eval(dataset) | |||||
| print("accuracy: ", acc) | |||||
| ``` | |||||
| ### Continue Training on the Pretrained Model | ### Continue Training on the Pretrained Model | ||||
| ``` | |||||
| # Load dataset | |||||
| dataset = create_dataset(cfg.data_path, cfg.epoch_size) | |||||
| batch_num = dataset.get_dataset_size() | |||||
| # Define model | |||||
| net = GoogleNet(num_classes=cfg.num_classes) | |||||
| # Continue training if set pre_trained to be True | |||||
| if cfg.pre_trained: | |||||
| param_dict = load_checkpoint(cfg.checkpoint_path) | |||||
| load_param_into_net(net, param_dict) | |||||
| lr = lr_steps(0, lr_max=cfg.lr_init, total_epochs=cfg.epoch_size, | |||||
| steps_per_epoch=batch_num) | |||||
| opt = Momentum(filter(lambda x: x.requires_grad, net.get_parameters()), | |||||
| Tensor(lr), cfg.momentum, weight_decay=cfg.weight_decay) | |||||
| loss = nn.SoftmaxCrossEntropyWithLogits(sparse=True, reduction='mean', is_grad=False) | |||||
| model = Model(net, loss_fn=loss, optimizer=opt, metrics={'acc'}, | |||||
| amp_level="O2", keep_batchnorm_fp32=False, loss_scale_manager=None) | |||||
| # Set callbacks | |||||
| config_ck = CheckpointConfig(save_checkpoint_steps=batch_num * 5, | |||||
| keep_checkpoint_max=cfg.keep_checkpoint_max) | |||||
| time_cb = TimeMonitor(data_size=batch_num) | |||||
| ckpoint_cb = ModelCheckpoint(prefix="train_googlenet_cifar10", directory="./", | |||||
| config=config_ck) | |||||
| loss_cb = LossMonitor() | |||||
| # Start training | |||||
| model.train(cfg.epoch_size, dataset, callbacks=[time_cb, ckpoint_cb, loss_cb]) | |||||
| print("train success") | |||||
| ``` | |||||
| - running on Ascend | |||||
| ``` | |||||
| # Load dataset | |||||
| dataset = create_dataset(cfg.data_path, 1) | |||||
| batch_num = dataset.get_dataset_size() | |||||
| # Define model | |||||
| net = GoogleNet(num_classes=cfg.num_classes) | |||||
| # Continue training if set pre_trained to be True | |||||
| if cfg.pre_trained: | |||||
| param_dict = load_checkpoint(cfg.checkpoint_path) | |||||
| load_param_into_net(net, param_dict) | |||||
| lr = lr_steps(0, lr_max=cfg.lr_init, total_epochs=cfg.epoch_size, | |||||
| steps_per_epoch=batch_num) | |||||
| opt = Momentum(filter(lambda x: x.requires_grad, net.get_parameters()), | |||||
| Tensor(lr), cfg.momentum, weight_decay=cfg.weight_decay) | |||||
| loss = nn.SoftmaxCrossEntropyWithLogits(sparse=True, reduction='mean', is_grad=False) | |||||
| model = Model(net, loss_fn=loss, optimizer=opt, metrics={'acc'}, | |||||
| amp_level="O2", keep_batchnorm_fp32=False, loss_scale_manager=None) | |||||
| # Set callbacks | |||||
| config_ck = CheckpointConfig(save_checkpoint_steps=batch_num * 5, | |||||
| keep_checkpoint_max=cfg.keep_checkpoint_max) | |||||
| time_cb = TimeMonitor(data_size=batch_num) | |||||
| ckpoint_cb = ModelCheckpoint(prefix="train_googlenet_cifar10", directory="./", | |||||
| config=config_ck) | |||||
| loss_cb = LossMonitor() | |||||
| # Start training | |||||
| model.train(cfg.epoch_size, dataset, callbacks=[time_cb, ckpoint_cb, loss_cb]) | |||||
| print("train success") | |||||
| ``` | |||||
| - running on GPU | |||||
| ``` | |||||
| # Load dataset | |||||
| dataset = create_dataset(cfg.data_path, 1) | |||||
| batch_num = dataset.get_dataset_size() | |||||
| # Define model | |||||
| net = GoogleNet(num_classes=cfg.num_classes) | |||||
| # Continue training if set pre_trained to be True | |||||
| if cfg.pre_trained: | |||||
| param_dict = load_checkpoint(cfg.checkpoint_path) | |||||
| load_param_into_net(net, param_dict) | |||||
| lr = lr_steps(0, lr_max=cfg.lr_init, total_epochs=cfg.epoch_size, | |||||
| steps_per_epoch=batch_num) | |||||
| opt = Momentum(filter(lambda x: x.requires_grad, net.get_parameters()), | |||||
| Tensor(lr), cfg.momentum, weight_decay=cfg.weight_decay) | |||||
| loss = nn.SoftmaxCrossEntropyWithLogits(sparse=True, reduction='mean', is_grad=False) | |||||
| model = Model(net, loss_fn=loss, optimizer=opt, metrics={'acc'}, | |||||
| amp_level="O2", keep_batchnorm_fp32=True, loss_scale_manager=None) | |||||
| # Set callbacks | |||||
| config_ck = CheckpointConfig(save_checkpoint_steps=batch_num * 5, | |||||
| keep_checkpoint_max=cfg.keep_checkpoint_max) | |||||
| time_cb = TimeMonitor(data_size=batch_num) | |||||
| ckpoint_cb = ModelCheckpoint(prefix="train_googlenet_cifar10", directory="./ckpt_" + str(get_rank()) + "/", | |||||
| config=config_ck) | |||||
| loss_cb = LossMonitor() | |||||
| # Start training | |||||
| model.train(cfg.epoch_size, dataset, callbacks=[time_cb, ckpoint_cb, loss_cb]) | |||||
| print("train success") | |||||
| ``` | |||||
| ### Transfer Learning | ### Transfer Learning | ||||
| To be added. | To be added. | ||||
+ 44
- 10
model_zoo/googlenet/eval.py
View File
| @@ -16,30 +16,64 @@ | |||||
| ##############test googlenet example on cifar10################# | ##############test googlenet example on cifar10################# | ||||
| python eval.py | python eval.py | ||||
| """ | """ | ||||
| import argparse | |||||
| import mindspore.nn as nn | import mindspore.nn as nn | ||||
| from mindspore import context | from mindspore import context | ||||
| from mindspore.nn.optim.momentum import Momentum | from mindspore.nn.optim.momentum import Momentum | ||||
| from mindspore.train.model import Model | from mindspore.train.model import Model | ||||
| from mindspore.train.serialization import load_checkpoint, load_param_into_net | from mindspore.train.serialization import load_checkpoint, load_param_into_net | ||||
| from src.config import cifar_cfg as cfg | |||||
| from src.dataset import create_dataset | |||||
| from src.config import cifar_cfg, imagenet_cfg | |||||
| from src.dataset import create_dataset_cifar10, create_dataset_imagenet | |||||
| from src.googlenet import GoogleNet | from src.googlenet import GoogleNet | ||||
| parser = argparse.ArgumentParser(description='googlenet') | |||||
| parser.add_argument('--dataset_name', type=str, default='cifar10', choices=['imagenet', 'cifar10'], | |||||
| help='dataset name.') | |||||
| parser.add_argument('--checkpoint_path', type=str, default=None, help='Checkpoint file path') | |||||
| args_opt = parser.parse_args() | |||||
| if __name__ == '__main__': | if __name__ == '__main__': | ||||
| if args_opt.dataset_name == 'cifar10': | |||||
| cfg = cifar_cfg | |||||
| dataset = create_dataset_cifar10(cfg.data_path, 1, False) | |||||
| loss = nn.SoftmaxCrossEntropyWithLogits(sparse=True, reduction='mean', is_grad=False) | |||||
| net = GoogleNet(num_classes=cfg.num_classes) | |||||
| opt = Momentum(filter(lambda x: x.requires_grad, net.get_parameters()), 0.01, cfg.momentum, | |||||
| weight_decay=cfg.weight_decay) | |||||
| model = Model(net, loss_fn=loss, optimizer=opt, metrics={'acc'}) | |||||
| elif args_opt.dataset_name == "imagenet": | |||||
| cfg = imagenet_cfg | |||||
| dataset = create_dataset_imagenet(cfg.val_data_path, 1, False) | |||||
| if not cfg.use_label_smooth: | |||||
| cfg.label_smooth_factor = 0.0 | |||||
| loss = nn.SoftmaxCrossEntropyWithLogits(sparse=True, reduction="mean", | |||||
| smooth_factor=cfg.label_smooth_factor, num_classes=cfg.num_classes) | |||||
| net = GoogleNet(num_classes=cfg.num_classes) | |||||
| model = Model(net, loss_fn=loss, metrics={'top_1_accuracy', 'top_5_accuracy'}) | |||||
| else: | |||||
| raise ValueError("dataset is not support.") | |||||
| device_target = cfg.device_target | |||||
| context.set_context(mode=context.GRAPH_MODE, device_target=cfg.device_target) | context.set_context(mode=context.GRAPH_MODE, device_target=cfg.device_target) | ||||
| context.set_context(device_id=cfg.device_id) | |||||
| if device_target == "Ascend": | |||||
| context.set_context(device_id=cfg.device_id) | |||||
| net = GoogleNet(num_classes=cfg.num_classes) | |||||
| opt = Momentum(filter(lambda x: x.requires_grad, net.get_parameters()), 0.01, cfg.momentum, | |||||
| weight_decay=cfg.weight_decay) | |||||
| loss = nn.SoftmaxCrossEntropyWithLogits(sparse=True, reduction='mean', is_grad=False) | |||||
| model = Model(net, loss_fn=loss, optimizer=opt, metrics={'acc'}) | |||||
| if args_opt.checkpoint_path is not None: | |||||
| param_dict = load_checkpoint(args_opt.checkpoint_path) | |||||
| print("load checkpoint from [{}].".format(args_opt.checkpoint_path)) | |||||
| else: | |||||
| param_dict = load_checkpoint(cfg.checkpoint_path) | |||||
| print("load checkpoint from [{}].".format(cfg.checkpoint_path)) | |||||
| param_dict = load_checkpoint(cfg.checkpoint_path) | |||||
| load_param_into_net(net, param_dict) | load_param_into_net(net, param_dict) | ||||
| net.set_train(False) | net.set_train(False) | ||||
| dataset = create_dataset(cfg.data_path, 1, False) | |||||
| acc = model.eval(dataset) | acc = model.eval(dataset) | ||||
| print("accuracy: ", acc) | print("accuracy: ", acc) | ||||
+ 19
- 6
model_zoo/googlenet/export.py
View File
| @@ -13,24 +13,37 @@ | |||||
| # limitations under the License. | # limitations under the License. | ||||
| # ============================================================================ | # ============================================================================ | ||||
| """ | """ | ||||
| ##############export checkpoint file into geir and onnx models################# | |||||
| ##############export checkpoint file into air and onnx models################# | |||||
| python export.py | python export.py | ||||
| """ | """ | ||||
| import argparse | |||||
| import numpy as np | import numpy as np | ||||
| import mindspore as ms | |||||
| from mindspore import Tensor | from mindspore import Tensor | ||||
| from mindspore.train.serialization import load_checkpoint, load_param_into_net, export | from mindspore.train.serialization import load_checkpoint, load_param_into_net, export | ||||
| from src.config import cifar_cfg as cfg | |||||
| from src.config import cifar_cfg, imagenet_cfg | |||||
| from src.googlenet import GoogleNet | from src.googlenet import GoogleNet | ||||
| if __name__ == '__main__': | if __name__ == '__main__': | ||||
| parser = argparse.ArgumentParser(description='Classification') | |||||
| parser.add_argument('--dataset_name', type=str, default='cifar10', choices=['imagenet', 'cifar10'], | |||||
| help='dataset name.') | |||||
| args_opt = parser.parse_args() | |||||
| if args_opt.dataset_name == 'cifar10': | |||||
| cfg = cifar_cfg | |||||
| elif args_opt.dataset_name == 'imagenet': | |||||
| cfg = imagenet_cfg | |||||
| else: | |||||
| raise ValueError("dataset is not support.") | |||||
| net = GoogleNet(num_classes=cfg.num_classes) | net = GoogleNet(num_classes=cfg.num_classes) | ||||
| assert cfg.checkpoint_path is not None, "cfg.checkpoint_path is None." | |||||
| param_dict = load_checkpoint(cfg.checkpoint_path) | param_dict = load_checkpoint(cfg.checkpoint_path) | ||||
| load_param_into_net(net, param_dict) | load_param_into_net(net, param_dict) | ||||
| input_arr = Tensor(np.random.uniform(0.0, 1.0, size=[1, 3, 224, 224]), ms.float32) | |||||
| input_arr = Tensor(np.random.uniform(0.0, 1.0, size=[1, 3, 224, 224]).astype(np.float32)) | |||||
| export(net, input_arr, file_name=cfg.onnx_filename, file_format="ONNX") | export(net, input_arr, file_name=cfg.onnx_filename, file_format="ONNX") | ||||
| export(net, input_arr, file_name=cfg.geir_filename, file_format="GEIR") | |||||
| export(net, input_arr, file_name=cfg.air_filename, file_format="AIR") | |||||
+ 25
- 0
model_zoo/googlenet/mindspore_hub_conf.py
View File
| @@ -0,0 +1,25 @@ | |||||
| # Copyright 2020 Huawei Technologies Co., Ltd | |||||
| # | |||||
| # Licensed under the Apache License, Version 2.0 (the "License"); | |||||
| # you may not use this file except in compliance with the License. | |||||
| # You may obtain a copy of the License at | |||||
| # | |||||
| # http://www.apache.org/licenses/LICENSE-2.0 | |||||
| # | |||||
| # Unless required by applicable law or agreed to in writing, software | |||||
| # distributed under the License is distributed on an "AS IS" BASIS, | |||||
| # WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. | |||||
| # See the License for the specific language governing permissions and | |||||
| # limitations under the License. | |||||
| # ============================================================================ | |||||
| """hub config.""" | |||||
| from src.googlenet import GoogleNet | |||||
| def googlenet(*args, **kwargs): | |||||
| return GoogleNet(*args, **kwargs) | |||||
| def create_network(name, *args, **kwargs): | |||||
| if name == "googlenet": | |||||
| return googlenet(*args, **kwargs) | |||||
| raise NotImplementedError(f"{name} is not implemented in the repo") | |||||
+ 43
- 0
model_zoo/googlenet/scripts/run_eval_gpu.sh
View File
| @@ -0,0 +1,43 @@ | |||||
| #!/bin/bash | |||||
| # Copyright 2020 Huawei Technologies Co., Ltd | |||||
| # | |||||
| # Licensed under the Apache License, Version 2.0 (the "License"); | |||||
| # you may not use this file except in compliance with the License. | |||||
| # You may obtain a copy of the License at | |||||
| # | |||||
| # http://www.apache.org/licenses/LICENSE-2.0 | |||||
| # | |||||
| # Unless required by applicable law or agreed to in writing, software | |||||
| # distributed under the License is distributed on an "AS IS" BASIS, | |||||
| # WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. | |||||
| # See the License for the specific language governing permissions and | |||||
| # limitations under the License. | |||||
| # ============================================================================ | |||||
| ulimit -u unlimited | |||||
| if [ $# != 1 ] | |||||
| then | |||||
| echo "GPU: sh run_eval_gpu.sh [CHECKPOINT_PATH]" | |||||
| exit 1 | |||||
| fi | |||||
| # check checkpoint file | |||||
| if [ ! -f $1 ] | |||||
| then | |||||
| echo "error: CHECKPOINT_PATH=$1 is not a file" | |||||
| exit 1 | |||||
| fi | |||||
| BASEPATH=$(cd "`dirname $0`" || exit; pwd) | |||||
| export PYTHONPATH=${BASEPATH}:$PYTHONPATH | |||||
| export DEVICE_ID=0 | |||||
| if [ -d "../eval" ]; | |||||
| then | |||||
| rm -rf ../eval | |||||
| fi | |||||
| mkdir ../eval | |||||
| cd ../eval || exit | |||||
| python3 ${BASEPATH}/../eval.py --checkpoint_path=$1 > ./eval.log 2>&1 & | |||||
+ 24
- 9
model_zoo/googlenet/scripts/run_train.sh
View File
| @@ -14,36 +14,51 @@ | |||||
| # limitations under the License. | # limitations under the License. | ||||
| # ============================================================================ | # ============================================================================ | ||||
| if [ $# != 1 ] | |||||
| if [ $# != 1 ] && [ $# != 2 ] | |||||
| then | then | ||||
| echo "Usage: sh run_train.sh [MINDSPORE_HCCL_CONFIG_PATH]" | |||||
| echo "Usage: sh run_train.sh [RANK_TABLE_FILE] [cifar10|imagenet]" | |||||
| exit 1 | exit 1 | ||||
| fi | fi | ||||
| if [ ! -f $1 ] | if [ ! -f $1 ] | ||||
| then | then | ||||
| echo "error: MINDSPORE_HCCL_CONFIG_PATH=$1 is not a file" | |||||
| echo "error: RANK_TABLE_FILE=$1 is not a file" | |||||
| exit 1 | exit 1 | ||||
| fi | fi | ||||
| dataset_type='cifar10' | |||||
| if [ $# == 2 ] | |||||
| then | |||||
| if [ $2 != "cifar10" ] && [ $2 != "imagenet" ] | |||||
| then | |||||
| echo "error: the selected dataset is neither cifar10 nor imagenet" | |||||
| exit 1 | |||||
| fi | |||||
| dataset_type=$2 | |||||
| fi | |||||
| ulimit -u unlimited | ulimit -u unlimited | ||||
| export DEVICE_NUM=8 | export DEVICE_NUM=8 | ||||
| export RANK_SIZE=8 | export RANK_SIZE=8 | ||||
| MINDSPORE_HCCL_CONFIG_PATH=$(realpath $1) | |||||
| export MINDSPORE_HCCL_CONFIG_PATH | |||||
| echo "MINDSPORE_HCCL_CONFIG_PATH=${MINDSPORE_HCCL_CONFIG_PATH}" | |||||
| RANK_TABLE_FILE=$(realpath $1) | |||||
| export RANK_TABLE_FILE | |||||
| echo "RANK_TABLE_FILE=${RANK_TABLE_FILE}" | |||||
| export SERVER_ID=0 | |||||
| rank_start=$((DEVICE_NUM * SERVER_ID)) | |||||
| for((i=0; i<${DEVICE_NUM}; i++)) | for((i=0; i<${DEVICE_NUM}; i++)) | ||||
| do | do | ||||
| export DEVICE_ID=$i | export DEVICE_ID=$i | ||||
| export RANK_ID=$i | |||||
| export RANK_ID=$((rank_start + i)) | |||||
| rm -rf ./train_parallel$i | rm -rf ./train_parallel$i | ||||
| mkdir ./train_parallel$i | mkdir ./train_parallel$i | ||||
| cp -r ./src ./train_parallel$i | cp -r ./src ./train_parallel$i | ||||
| cp ./train.py ./train_parallel$i | cp ./train.py ./train_parallel$i | ||||
| echo "start training for rank $RANK_ID, device $DEVICE_ID" | |||||
| echo "start training for rank $RANK_ID, device $DEVICE_ID, $dataset_type" | |||||
| cd ./train_parallel$i ||exit | cd ./train_parallel$i ||exit | ||||
| env > env.log | env > env.log | ||||
| python train.py --device_id=$i > log 2>&1 & | |||||
| python train.py --device_id=$i --dataset_name=$dataset_type> log 2>&1 & | |||||
| cd .. | cd .. | ||||
| done | done | ||||
+ 51
- 0
model_zoo/googlenet/scripts/run_train_gpu.sh
View File
| @@ -0,0 +1,51 @@ | |||||
| #!/bin/bash | |||||
| # Copyright 2020 Huawei Technologies Co., Ltd | |||||
| # | |||||
| # Licensed under the Apache License, Version 2.0 (the "License"); | |||||
| # you may not use this file except in compliance with the License. | |||||
| # You may obtain a copy of the License at | |||||
| # | |||||
| # http://www.apache.org/licenses/LICENSE-2.0 | |||||
| # | |||||
| # Unless required by applicable law or agreed to in writing, software | |||||
| # distributed under the License is distributed on an "AS IS" BASIS, | |||||
| # WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. | |||||
| # See the License for the specific language governing permissions and | |||||
| # limitations under the License. | |||||
| # ============================================================================ | |||||
| if [ $# -lt 2 ] | |||||
| then | |||||
| echo "Usage:\n \ | |||||
| sh run_train.sh [DEVICE_NUM] [VISIABLE_DEVICES(0,1,2,3,4,5,6,7)]\n \ | |||||
| " | |||||
| exit 1 | |||||
| fi | |||||
| if [ $1 -lt 1 ] && [ $1 -gt 8 ] | |||||
| then | |||||
| echo "error: DEVICE_NUM=$1 is not in (1-8)" | |||||
| exit 1 | |||||
| fi | |||||
| export DEVICE_NUM=$1 | |||||
| export RANK_SIZE=$1 | |||||
| BASEPATH=$(cd "`dirname $0`" || exit; pwd) | |||||
| export PYTHONPATH=${BASEPATH}:$PYTHONPATH | |||||
| if [ -d "../train" ]; | |||||
| then | |||||
| rm -rf ../train | |||||
| fi | |||||
| mkdir ../train | |||||
| cd ../train || exit | |||||
| export CUDA_VISIBLE_DEVICES="$2" | |||||
| if [ $1 -gt 1 ] | |||||
| then | |||||
| mpirun -n $1 --allow-run-as-root \ | |||||
| python3 ${BASEPATH}/../train.py > train.log 2>&1 & | |||||
| else | |||||
| python3 ${BASEPATH}/../train.py > train.log 2>&1 & | |||||
| fi | |||||
+ 39
- 2
model_zoo/googlenet/src/config.py
View File
| @@ -18,6 +18,7 @@ network config setting, will be used in main.py | |||||
| from easydict import EasyDict as edict | from easydict import EasyDict as edict | ||||
| cifar_cfg = edict({ | cifar_cfg = edict({ | ||||
| 'name': 'cifar10', | |||||
| 'pre_trained': False, | 'pre_trained': False, | ||||
| 'num_classes': 10, | 'num_classes': 10, | ||||
| 'lr_init': 0.1, | 'lr_init': 0.1, | ||||
| @@ -30,9 +31,45 @@ cifar_cfg = edict({ | |||||
| 'image_width': 224, | 'image_width': 224, | ||||
| 'data_path': './cifar10', | 'data_path': './cifar10', | ||||
| 'device_target': 'Ascend', | 'device_target': 'Ascend', | ||||
| 'device_id': 4, | |||||
| 'device_id': 0, | |||||
| 'keep_checkpoint_max': 10, | 'keep_checkpoint_max': 10, | ||||
| 'checkpoint_path': './train_googlenet_cifar10-125_390.ckpt', | 'checkpoint_path': './train_googlenet_cifar10-125_390.ckpt', | ||||
| 'onnx_filename': 'googlenet.onnx', | 'onnx_filename': 'googlenet.onnx', | ||||
| 'geir_filename': 'googlenet.geir' | |||||
| 'air_filename': 'googlenet.air' | |||||
| }) | |||||
| imagenet_cfg = edict({ | |||||
| 'name': 'imagenet', | |||||
| 'pre_trained': False, | |||||
| 'num_classes': 1000, | |||||
| 'lr_init': 0.1, | |||||
| 'batch_size': 256, | |||||
| 'epoch_size': 300, | |||||
| 'momentum': 0.9, | |||||
| 'weight_decay': 1e-4, | |||||
| 'buffer_size': None, # invalid parameter | |||||
| 'image_height': 224, | |||||
| 'image_width': 224, | |||||
| 'data_path': './ImageNet_Original/train/', | |||||
| 'val_data_path': './ImageNet_Original/val/', | |||||
| 'device_target': 'Ascend', | |||||
| 'device_id': 0, | |||||
| 'keep_checkpoint_max': 10, | |||||
| 'checkpoint_path': None, | |||||
| 'onnx_filename': 'googlenet.onnx', | |||||
| 'air_filename': 'googlenet.air', | |||||
| # optimizer and lr related | |||||
| 'lr_scheduler': 'exponential', | |||||
| 'lr_epochs': [70, 140, 210, 280], | |||||
| 'lr_gamma': 0.3, | |||||
| 'eta_min': 0.0, | |||||
| 'T_max': 150, | |||||
| 'warmup_epochs': 0, | |||||
| # loss related | |||||
| 'is_dynamic_loss_scale': 0, | |||||
| 'loss_scale': 1024, | |||||
| 'label_smooth_factor': 0.1, | |||||
| 'use_label_smooth': True, | |||||
| }) | }) | ||||
+ 88
- 11
model_zoo/googlenet/src/dataset.py
View File
| @@ -21,27 +21,30 @@ import mindspore.common.dtype as mstype | |||||
| import mindspore.dataset as ds | import mindspore.dataset as ds | ||||
| import mindspore.dataset.transforms.c_transforms as C | import mindspore.dataset.transforms.c_transforms as C | ||||
| import mindspore.dataset.transforms.vision.c_transforms as vision | import mindspore.dataset.transforms.vision.c_transforms as vision | ||||
| from src.config import cifar_cfg as cfg | |||||
| from src.config import cifar_cfg, imagenet_cfg | |||||
| def create_dataset(data_home, repeat_num=1, training=True): | |||||
| def create_dataset_cifar10(data_home, repeat_num=1, training=True): | |||||
| """Data operations.""" | """Data operations.""" | ||||
| ds.config.set_seed(1) | ds.config.set_seed(1) | ||||
| data_dir = os.path.join(data_home, "cifar-10-batches-bin") | data_dir = os.path.join(data_home, "cifar-10-batches-bin") | ||||
| if not training: | if not training: | ||||
| data_dir = os.path.join(data_home, "cifar-10-verify-bin") | data_dir = os.path.join(data_home, "cifar-10-verify-bin") | ||||
| rank_size = int(os.environ.get("RANK_SIZE")) if os.environ.get("RANK_SIZE") else None | |||||
| rank_id = int(os.environ.get("RANK_ID")) if os.environ.get("RANK_ID") else None | |||||
| data_set = ds.Cifar10Dataset(data_dir, num_shards=rank_size, shard_id=rank_id) | |||||
| rank_size, rank_id = _get_rank_info() | |||||
| if training: | |||||
| data_set = ds.Cifar10Dataset(data_dir, num_shards=rank_size, shard_id=rank_id, shuffle=True) | |||||
| else: | |||||
| data_set = ds.Cifar10Dataset(data_dir, num_shards=rank_size, shard_id=rank_id, shuffle=False) | |||||
| resize_height = cfg.image_height | |||||
| resize_width = cfg.image_width | |||||
| resize_height = cifar_cfg.image_height | |||||
| resize_width = cifar_cfg.image_width | |||||
| # define map operations | # define map operations | ||||
| random_crop_op = vision.RandomCrop((32, 32), (4, 4, 4, 4)) # padding_mode default CONSTANT | random_crop_op = vision.RandomCrop((32, 32), (4, 4, 4, 4)) # padding_mode default CONSTANT | ||||
| random_horizontal_op = vision.RandomHorizontalFlip() | random_horizontal_op = vision.RandomHorizontalFlip() | ||||
| resize_op = vision.Resize((resize_height, resize_width)) # interpolation default BILINEAR | resize_op = vision.Resize((resize_height, resize_width)) # interpolation default BILINEAR | ||||
| rescale_op = vision.Rescale(1.0 / 255.0, 0.0) | |||||
| normalize_op = vision.Normalize((0.4914, 0.4822, 0.4465), (0.2023, 0.1994, 0.2010)) | normalize_op = vision.Normalize((0.4914, 0.4822, 0.4465), (0.2023, 0.1994, 0.2010)) | ||||
| changeswap_op = vision.HWC2CHW() | changeswap_op = vision.HWC2CHW() | ||||
| type_cast_op = C.TypeCast(mstype.int32) | type_cast_op = C.TypeCast(mstype.int32) | ||||
| @@ -49,19 +52,93 @@ def create_dataset(data_home, repeat_num=1, training=True): | |||||
| c_trans = [] | c_trans = [] | ||||
| if training: | if training: | ||||
| c_trans = [random_crop_op, random_horizontal_op] | c_trans = [random_crop_op, random_horizontal_op] | ||||
| c_trans += [resize_op, normalize_op, changeswap_op] | |||||
| c_trans += [resize_op, rescale_op, normalize_op, changeswap_op] | |||||
| # apply map operations on images | # apply map operations on images | ||||
| data_set = data_set.map(input_columns="label", operations=type_cast_op) | data_set = data_set.map(input_columns="label", operations=type_cast_op) | ||||
| data_set = data_set.map(input_columns="image", operations=c_trans) | data_set = data_set.map(input_columns="image", operations=c_trans) | ||||
| # apply batch operations | |||||
| data_set = data_set.batch(batch_size=cifar_cfg.batch_size, drop_remainder=True) | |||||
| # apply repeat operations | # apply repeat operations | ||||
| data_set = data_set.repeat(repeat_num) | data_set = data_set.repeat(repeat_num) | ||||
| # apply shuffle operations | |||||
| data_set = data_set.shuffle(buffer_size=10) | |||||
| return data_set | |||||
| def create_dataset_imagenet(dataset_path, repeat_num=1, training=True, | |||||
| num_parallel_workers=None, shuffle=None): | |||||
| """ | |||||
| create a train or eval imagenet2012 dataset for resnet50 | |||||
| Args: | |||||
| dataset_path(string): the path of dataset. | |||||
| do_train(bool): whether dataset is used for train or eval. | |||||
| repeat_num(int): the repeat times of dataset. Default: 1 | |||||
| batch_size(int): the batch size of dataset. Default: 32 | |||||
| target(str): the device target. Default: Ascend | |||||
| Returns: | |||||
| dataset | |||||
| """ | |||||
| device_num, rank_id = _get_rank_info() | |||||
| if device_num == 1: | |||||
| data_set = ds.ImageFolderDatasetV2(dataset_path, num_parallel_workers=num_parallel_workers, shuffle=shuffle) | |||||
| else: | |||||
| data_set = ds.ImageFolderDatasetV2(dataset_path, num_parallel_workers=num_parallel_workers, shuffle=shuffle, | |||||
| num_shards=device_num, shard_id=rank_id) | |||||
| assert imagenet_cfg.image_height == imagenet_cfg.image_width, "image_height not equal image_width" | |||||
| image_size = imagenet_cfg.image_height | |||||
| mean = [0.485 * 255, 0.456 * 255, 0.406 * 255] | |||||
| std = [0.229 * 255, 0.224 * 255, 0.225 * 255] | |||||
| # define map operations | |||||
| if training: | |||||
| transform_img = [ | |||||
| vision.RandomCropDecodeResize(image_size, scale=(0.08, 1.0), ratio=(0.75, 1.333)), | |||||
| vision.RandomHorizontalFlip(prob=0.5), | |||||
| vision.RandomColorAdjust(0.4, 0.4, 0.4, 0.1), | |||||
| vision.Normalize(mean=mean, std=std), | |||||
| vision.HWC2CHW() | |||||
| ] | |||||
| else: | |||||
| transform_img = [ | |||||
| vision.Decode(), | |||||
| vision.Resize(256), | |||||
| vision.CenterCrop(image_size), | |||||
| vision.Normalize(mean=mean, std=std), | |||||
| vision.HWC2CHW() | |||||
| ] | |||||
| transform_label = [C.TypeCast(mstype.int32)] | |||||
| data_set = data_set.map(input_columns="image", num_parallel_workers=8, operations=transform_img) | |||||
| data_set = data_set.map(input_columns="label", num_parallel_workers=8, operations=transform_label) | |||||
| # apply batch operations | # apply batch operations | ||||
| data_set = data_set.batch(batch_size=cfg.batch_size, drop_remainder=True) | |||||
| data_set = data_set.batch(imagenet_cfg.batch_size, drop_remainder=True) | |||||
| # apply dataset repeat operation | |||||
| data_set = data_set.repeat(repeat_num) | |||||
| return data_set | return data_set | ||||
| def _get_rank_info(): | |||||
| """ | |||||
| get rank size and rank id | |||||
| """ | |||||
| rank_size = int(os.environ.get("RANK_SIZE", 1)) | |||||
| if rank_size > 1: | |||||
| from mindspore.communication.management import get_rank, get_group_size | |||||
| rank_size = get_group_size() | |||||
| rank_id = get_rank() | |||||
| else: | |||||
| rank_size = rank_id = None | |||||
| return rank_size, rank_id | |||||
+ 11
- 12
model_zoo/googlenet/src/googlenet.py
View File
| @@ -63,7 +63,7 @@ class Inception(nn.Cell): | |||||
| Conv2dBlock(n3x3red, n3x3, kernel_size=3, padding=0)]) | Conv2dBlock(n3x3red, n3x3, kernel_size=3, padding=0)]) | ||||
| self.b3 = nn.SequentialCell([Conv2dBlock(in_channels, n5x5red, kernel_size=1), | self.b3 = nn.SequentialCell([Conv2dBlock(in_channels, n5x5red, kernel_size=1), | ||||
| Conv2dBlock(n5x5red, n5x5, kernel_size=3, padding=0)]) | Conv2dBlock(n5x5red, n5x5, kernel_size=3, padding=0)]) | ||||
| self.maxpool = P.MaxPoolWithArgmax(ksize=3, strides=1, padding="same") | |||||
| self.maxpool = nn.MaxPool2d(kernel_size=3, stride=1, pad_mode="same") | |||||
| self.b4 = Conv2dBlock(in_channels, pool_planes, kernel_size=1) | self.b4 = Conv2dBlock(in_channels, pool_planes, kernel_size=1) | ||||
| self.concat = P.Concat(axis=1) | self.concat = P.Concat(axis=1) | ||||
| @@ -71,9 +71,8 @@ class Inception(nn.Cell): | |||||
| branch1 = self.b1(x) | branch1 = self.b1(x) | ||||
| branch2 = self.b2(x) | branch2 = self.b2(x) | ||||
| branch3 = self.b3(x) | branch3 = self.b3(x) | ||||
| cell, argmax = self.maxpool(x) | |||||
| cell = self.maxpool(x) | |||||
| branch4 = self.b4(cell) | branch4 = self.b4(cell) | ||||
| _ = argmax | |||||
| return self.concat((branch1, branch2, branch3, branch4)) | return self.concat((branch1, branch2, branch3, branch4)) | ||||
| @@ -85,22 +84,22 @@ class GoogleNet(nn.Cell): | |||||
| def __init__(self, num_classes): | def __init__(self, num_classes): | ||||
| super(GoogleNet, self).__init__() | super(GoogleNet, self).__init__() | ||||
| self.conv1 = Conv2dBlock(3, 64, kernel_size=7, stride=2, padding=0) | self.conv1 = Conv2dBlock(3, 64, kernel_size=7, stride=2, padding=0) | ||||
| self.maxpool1 = P.MaxPoolWithArgmax(ksize=3, strides=2, padding="same") | |||||
| self.maxpool1 = nn.MaxPool2d(kernel_size=3, stride=2, pad_mode="same") | |||||
| self.conv2 = Conv2dBlock(64, 64, kernel_size=1) | self.conv2 = Conv2dBlock(64, 64, kernel_size=1) | ||||
| self.conv3 = Conv2dBlock(64, 192, kernel_size=3, padding=0) | self.conv3 = Conv2dBlock(64, 192, kernel_size=3, padding=0) | ||||
| self.maxpool2 = P.MaxPoolWithArgmax(ksize=3, strides=2, padding="same") | |||||
| self.maxpool2 = nn.MaxPool2d(kernel_size=3, stride=2, pad_mode="same") | |||||
| self.block3a = Inception(192, 64, 96, 128, 16, 32, 32) | self.block3a = Inception(192, 64, 96, 128, 16, 32, 32) | ||||
| self.block3b = Inception(256, 128, 128, 192, 32, 96, 64) | self.block3b = Inception(256, 128, 128, 192, 32, 96, 64) | ||||
| self.maxpool3 = P.MaxPoolWithArgmax(ksize=3, strides=2, padding="same") | |||||
| self.maxpool3 = nn.MaxPool2d(kernel_size=3, stride=2, pad_mode="same") | |||||
| self.block4a = Inception(480, 192, 96, 208, 16, 48, 64) | self.block4a = Inception(480, 192, 96, 208, 16, 48, 64) | ||||
| self.block4b = Inception(512, 160, 112, 224, 24, 64, 64) | self.block4b = Inception(512, 160, 112, 224, 24, 64, 64) | ||||
| self.block4c = Inception(512, 128, 128, 256, 24, 64, 64) | self.block4c = Inception(512, 128, 128, 256, 24, 64, 64) | ||||
| self.block4d = Inception(512, 112, 144, 288, 32, 64, 64) | self.block4d = Inception(512, 112, 144, 288, 32, 64, 64) | ||||
| self.block4e = Inception(528, 256, 160, 320, 32, 128, 128) | self.block4e = Inception(528, 256, 160, 320, 32, 128, 128) | ||||
| self.maxpool4 = P.MaxPoolWithArgmax(ksize=2, strides=2, padding="same") | |||||
| self.maxpool4 = nn.MaxPool2d(kernel_size=2, stride=2, pad_mode="same") | |||||
| self.block5a = Inception(832, 256, 160, 320, 32, 128, 128) | self.block5a = Inception(832, 256, 160, 320, 32, 128, 128) | ||||
| self.block5b = Inception(832, 384, 192, 384, 48, 128, 128) | self.block5b = Inception(832, 384, 192, 384, 48, 128, 128) | ||||
| @@ -113,23 +112,24 @@ class GoogleNet(nn.Cell): | |||||
| def construct(self, x): | def construct(self, x): | ||||
| """construct""" | |||||
| x = self.conv1(x) | x = self.conv1(x) | ||||
| x, argmax = self.maxpool1(x) | |||||
| x = self.maxpool1(x) | |||||
| x = self.conv2(x) | x = self.conv2(x) | ||||
| x = self.conv3(x) | x = self.conv3(x) | ||||
| x, argmax = self.maxpool2(x) | |||||
| x = self.maxpool2(x) | |||||
| x = self.block3a(x) | x = self.block3a(x) | ||||
| x = self.block3b(x) | x = self.block3b(x) | ||||
| x, argmax = self.maxpool3(x) | |||||
| x = self.maxpool3(x) | |||||
| x = self.block4a(x) | x = self.block4a(x) | ||||
| x = self.block4b(x) | x = self.block4b(x) | ||||
| x = self.block4c(x) | x = self.block4c(x) | ||||
| x = self.block4d(x) | x = self.block4d(x) | ||||
| x = self.block4e(x) | x = self.block4e(x) | ||||
| x, argmax = self.maxpool4(x) | |||||
| x = self.maxpool4(x) | |||||
| x = self.block5a(x) | x = self.block5a(x) | ||||
| x = self.block5b(x) | x = self.block5b(x) | ||||
| @@ -138,5 +138,4 @@ class GoogleNet(nn.Cell): | |||||
| x = self.flatten(x) | x = self.flatten(x) | ||||
| x = self.classifier(x) | x = self.classifier(x) | ||||
| _ = argmax | |||||
| return x | return x | ||||
+ 0
- 0
model_zoo/googlenet/src/lr_scheduler/__init__.py
View File
+ 20
- 0
model_zoo/googlenet/src/lr_scheduler/linear_warmup.py
View File
| @@ -0,0 +1,20 @@ | |||||
| # Copyright 2020 Huawei Technologies Co., Ltd | |||||
| # | |||||
| # Licensed under the Apache License, Version 2.0 (the "License"); | |||||
| # you may not use this file except in compliance with the License. | |||||
| # You may obtain a copy of the License at | |||||
| # | |||||
| # http://www.apache.org/licenses/LICENSE-2.0 | |||||
| # | |||||
| # Unless required by applicable law or agreed to in writing, software | |||||
| # distributed under the License is distributed on an "AS IS" BASIS, | |||||
| # WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. | |||||
| # See the License for the specific language governing permissions and | |||||
| # limitations under the License. | |||||
| # ============================================================================ | |||||
| """lr""" | |||||
| def linear_warmup_lr(current_step, warmup_steps, base_lr, init_lr): | |||||
| lr_inc = (float(base_lr) - float(init_lr)) / float(warmup_steps) | |||||
| lr = float(init_lr) + lr_inc * current_step | |||||
| return lr | |||||
+ 39
- 0
model_zoo/googlenet/src/lr_scheduler/warmup_cosine_annealing_lr.py
View File
| @@ -0,0 +1,39 @@ | |||||
| # Copyright 2020 Huawei Technologies Co., Ltd | |||||
| # | |||||
| # Licensed under the Apache License, Version 2.0 (the "License"); | |||||
| # you may not use this file except in compliance with the License. | |||||
| # You may obtain a copy of the License at | |||||
| # | |||||
| # http://www.apache.org/licenses/LICENSE-2.0 | |||||
| # | |||||
| # Unless required by applicable law or agreed to in writing, software | |||||
| # distributed under the License is distributed on an "AS IS" BASIS, | |||||
| # WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. | |||||
| # See the License for the specific language governing permissions and | |||||
| # limitations under the License. | |||||
| # ============================================================================ | |||||
| """lr""" | |||||
| import math | |||||
| import numpy as np | |||||
| from .linear_warmup import linear_warmup_lr | |||||
| def warmup_cosine_annealing_lr(lr, steps_per_epoch, warmup_epochs, max_epoch, T_max, eta_min=0): | |||||
| """ warmup cosine annealing lr""" | |||||
| base_lr = lr | |||||
| warmup_init_lr = 0 | |||||
| total_steps = int(max_epoch * steps_per_epoch) | |||||
| warmup_steps = int(warmup_epochs * steps_per_epoch) | |||||
| lr_each_step = [] | |||||
| for i in range(total_steps): | |||||
| last_epoch = i // steps_per_epoch | |||||
| if i < warmup_steps: | |||||
| lr = linear_warmup_lr(i + 1, warmup_steps, base_lr, warmup_init_lr) | |||||
| else: | |||||
| lr = eta_min + (base_lr - eta_min) * (1. + math.cos(math.pi * last_epoch / T_max)) / 2 | |||||
| lr_each_step.append(lr) | |||||
| return np.array(lr_each_step).astype(np.float32) | |||||
+ 59
- 0
model_zoo/googlenet/src/lr_scheduler/warmup_step_lr.py
View File
| @@ -0,0 +1,59 @@ | |||||
| # Copyright 2020 Huawei Technologies Co., Ltd | |||||
| # | |||||
| # Licensed under the Apache License, Version 2.0 (the "License"); | |||||
| # you may not use this file except in compliance with the License. | |||||
| # You may obtain a copy of the License at | |||||
| # | |||||
| # http://www.apache.org/licenses/LICENSE-2.0 | |||||
| # | |||||
| # Unless required by applicable law or agreed to in writing, software | |||||
| # distributed under the License is distributed on an "AS IS" BASIS, | |||||
| # WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied. | |||||
| # See the License for the specific language governing permissions and | |||||
| # limitations under the License. | |||||
| # ============================================================================ | |||||
| """lr""" | |||||
| from collections import Counter | |||||
| import numpy as np | |||||
| from .linear_warmup import linear_warmup_lr | |||||
| def warmup_step_lr(lr, lr_epochs, steps_per_epoch, warmup_epochs, max_epoch, gamma=0.1): | |||||
| """warmup step lr""" | |||||
| base_lr = lr | |||||
| warmup_init_lr = 0 | |||||
| total_steps = int(max_epoch * steps_per_epoch) | |||||
| warmup_steps = int(warmup_epochs * steps_per_epoch) | |||||
| milestones = lr_epochs | |||||
| milestones_steps = [] | |||||
| for milestone in milestones: | |||||
| milestones_step = milestone * steps_per_epoch | |||||
| milestones_steps.append(milestones_step) | |||||
| lr_each_step = [] | |||||
| lr = base_lr | |||||
| milestones_steps_counter = Counter(milestones_steps) | |||||
| for i in range(total_steps): | |||||
| if i < warmup_steps: | |||||
| lr = linear_warmup_lr(i + 1, warmup_steps, base_lr, warmup_init_lr) | |||||
| else: | |||||
| lr = lr * gamma ** milestones_steps_counter[i] | |||||
| lr_each_step.append(lr) | |||||
| return np.array(lr_each_step).astype(np.float32) | |||||
| def multi_step_lr(lr, milestones, steps_per_epoch, max_epoch, gamma=0.1): | |||||
| """lr""" | |||||
| return warmup_step_lr(lr, milestones, steps_per_epoch, 0, max_epoch, gamma=gamma) | |||||
| def step_lr(lr, epoch_size, steps_per_epoch, max_epoch, gamma=0.1): | |||||
| """lr""" | |||||
| lr_epochs = [] | |||||
| for i in range(1, max_epoch): | |||||
| if i % epoch_size == 0: | |||||
| lr_epochs.append(i) | |||||
| return multi_step_lr(lr, lr_epochs, steps_per_epoch, max_epoch, gamma=gamma) | |||||
+ 137
- 22
model_zoo/googlenet/train.py
View File
| @@ -25,21 +25,23 @@ import numpy as np | |||||
| import mindspore.nn as nn | import mindspore.nn as nn | ||||
| from mindspore import Tensor | from mindspore import Tensor | ||||
| from mindspore import context | from mindspore import context | ||||
| from mindspore.communication.management import init | |||||
| from mindspore.communication.management import init, get_rank | |||||
| from mindspore.nn.optim.momentum import Momentum | from mindspore.nn.optim.momentum import Momentum | ||||
| from mindspore.train.callback import ModelCheckpoint, CheckpointConfig, LossMonitor, TimeMonitor | from mindspore.train.callback import ModelCheckpoint, CheckpointConfig, LossMonitor, TimeMonitor | ||||
| from mindspore.train.model import Model, ParallelMode | |||||
| from mindspore.train.loss_scale_manager import DynamicLossScaleManager, FixedLossScaleManager | |||||
| from mindspore.train.model import Model | |||||
| from mindspore import ParallelMode | |||||
| from mindspore.train.serialization import load_checkpoint, load_param_into_net | from mindspore.train.serialization import load_checkpoint, load_param_into_net | ||||
| from src.config import cifar_cfg as cfg | |||||
| from src.dataset import create_dataset | |||||
| from src.config import cifar_cfg, imagenet_cfg | |||||
| from src.dataset import create_dataset_cifar10, create_dataset_imagenet | |||||
| from src.googlenet import GoogleNet | from src.googlenet import GoogleNet | ||||
| random.seed(1) | random.seed(1) | ||||
| np.random.seed(1) | np.random.seed(1) | ||||
| def lr_steps(global_step, lr_max=None, total_epochs=None, steps_per_epoch=None): | |||||
| def lr_steps_cifar10(global_step, lr_max=None, total_epochs=None, steps_per_epoch=None): | |||||
| """Set learning rate.""" | """Set learning rate.""" | ||||
| lr_each_step = [] | lr_each_step = [] | ||||
| total_steps = steps_per_epoch * total_epochs | total_steps = steps_per_epoch * total_epochs | ||||
| @@ -60,25 +62,79 @@ def lr_steps(global_step, lr_max=None, total_epochs=None, steps_per_epoch=None): | |||||
| return learning_rate | return learning_rate | ||||
| def lr_steps_imagenet(_cfg, steps_per_epoch): | |||||
| """lr step for imagenet""" | |||||
| from src.lr_scheduler.warmup_step_lr import warmup_step_lr | |||||
| from src.lr_scheduler.warmup_cosine_annealing_lr import warmup_cosine_annealing_lr | |||||
| if _cfg.lr_scheduler == 'exponential': | |||||
| _lr = warmup_step_lr(_cfg.lr_init, | |||||
| _cfg.lr_epochs, | |||||
| steps_per_epoch, | |||||
| _cfg.warmup_epochs, | |||||
| _cfg.epoch_size, | |||||
| gamma=_cfg.lr_gamma, | |||||
| ) | |||||
| elif _cfg.lr_scheduler == 'cosine_annealing': | |||||
| _lr = warmup_cosine_annealing_lr(_cfg.lr_init, | |||||
| steps_per_epoch, | |||||
| _cfg.warmup_epochs, | |||||
| _cfg.epoch_size, | |||||
| _cfg.T_max, | |||||
| _cfg.eta_min) | |||||
| else: | |||||
| raise NotImplementedError(_cfg.lr_scheduler) | |||||
| return _lr | |||||
| if __name__ == '__main__': | if __name__ == '__main__': | ||||
| parser = argparse.ArgumentParser(description='Cifar10 classification') | |||||
| parser = argparse.ArgumentParser(description='Classification') | |||||
| parser.add_argument('--dataset_name', type=str, default='cifar10', choices=['imagenet', 'cifar10'], | |||||
| help='dataset name.') | |||||
| parser.add_argument('--device_id', type=int, default=None, help='device id of GPU or Ascend. (Default: None)') | parser.add_argument('--device_id', type=int, default=None, help='device id of GPU or Ascend. (Default: None)') | ||||
| args_opt = parser.parse_args() | args_opt = parser.parse_args() | ||||
| context.set_context(mode=context.GRAPH_MODE, device_target=cfg.device_target) | |||||
| if args_opt.device_id is not None: | |||||
| context.set_context(device_id=args_opt.device_id) | |||||
| if args_opt.dataset_name == "cifar10": | |||||
| cfg = cifar_cfg | |||||
| elif args_opt.dataset_name == "imagenet": | |||||
| cfg = imagenet_cfg | |||||
| else: | else: | ||||
| context.set_context(device_id=cfg.device_id) | |||||
| raise ValueError("Unsupport dataset.") | |||||
| # set context | |||||
| device_target = cfg.device_target | |||||
| context.set_context(mode=context.GRAPH_MODE, device_target=cfg.device_target) | |||||
| device_num = int(os.environ.get("DEVICE_NUM", 1)) | device_num = int(os.environ.get("DEVICE_NUM", 1)) | ||||
| if device_num > 1: | |||||
| context.reset_auto_parallel_context() | |||||
| context.set_auto_parallel_context(device_num=device_num, parallel_mode=ParallelMode.DATA_PARALLEL, | |||||
| mirror_mean=True) | |||||
| if device_target == "Ascend": | |||||
| if args_opt.device_id is not None: | |||||
| context.set_context(device_id=args_opt.device_id) | |||||
| else: | |||||
| context.set_context(device_id=cfg.device_id) | |||||
| if device_num > 1: | |||||
| context.reset_auto_parallel_context() | |||||
| context.set_auto_parallel_context(device_num=device_num, parallel_mode=ParallelMode.DATA_PARALLEL, | |||||
| mirror_mean=True) | |||||
| init() | |||||
| elif device_target == "GPU": | |||||
| init() | init() | ||||
| dataset = create_dataset(cfg.data_path, cfg.epoch_size) | |||||
| if device_num > 1: | |||||
| context.reset_auto_parallel_context() | |||||
| context.set_auto_parallel_context(device_num=device_num, parallel_mode=ParallelMode.DATA_PARALLEL, | |||||
| mirror_mean=True) | |||||
| else: | |||||
| raise ValueError("Unsupported platform.") | |||||
| if args_opt.dataset_name == "cifar10": | |||||
| dataset = create_dataset_cifar10(cfg.data_path, cfg.epoch_size) | |||||
| elif args_opt.dataset_name == "imagenet": | |||||
| dataset = create_dataset_imagenet(cfg.data_path, cfg.epoch_size) | |||||
| else: | |||||
| raise ValueError("Unsupport dataset.") | |||||
| batch_num = dataset.get_dataset_size() | batch_num = dataset.get_dataset_size() | ||||
| net = GoogleNet(num_classes=cfg.num_classes) | net = GoogleNet(num_classes=cfg.num_classes) | ||||
| @@ -86,16 +142,75 @@ if __name__ == '__main__': | |||||
| if cfg.pre_trained: | if cfg.pre_trained: | ||||
| param_dict = load_checkpoint(cfg.checkpoint_path) | param_dict = load_checkpoint(cfg.checkpoint_path) | ||||
| load_param_into_net(net, param_dict) | load_param_into_net(net, param_dict) | ||||
| lr = lr_steps(0, lr_max=cfg.lr_init, total_epochs=cfg.epoch_size, steps_per_epoch=batch_num) | |||||
| opt = Momentum(filter(lambda x: x.requires_grad, net.get_parameters()), Tensor(lr), cfg.momentum, | |||||
| weight_decay=cfg.weight_decay) | |||||
| loss = nn.SoftmaxCrossEntropyWithLogits(sparse=True, reduction='mean', is_grad=False) | |||||
| model = Model(net, loss_fn=loss, optimizer=opt, metrics={'acc'}, | |||||
| amp_level="O2", keep_batchnorm_fp32=False, loss_scale_manager=None) | |||||
| loss_scale_manager = None | |||||
| if args_opt.dataset_name == 'cifar10': | |||||
| lr = lr_steps_cifar10(0, lr_max=cfg.lr_init, total_epochs=cfg.epoch_size, steps_per_epoch=batch_num) | |||||
| opt = Momentum(filter(lambda x: x.requires_grad, net.get_parameters()), | |||||
| learning_rate=Tensor(lr), | |||||
| momentum=cfg.momentum, | |||||
| weight_decay=cfg.weight_decay) | |||||
| loss = nn.SoftmaxCrossEntropyWithLogits(sparse=True, reduction='mean', is_grad=False) | |||||
| elif args_opt.dataset_name == 'imagenet': | |||||
| lr = lr_steps_imagenet(cfg, batch_num) | |||||
| def get_param_groups(network): | |||||
| """ get param groups """ | |||||
| decay_params = [] | |||||
| no_decay_params = [] | |||||
| for x in network.trainable_params(): | |||||
| parameter_name = x.name | |||||
| if parameter_name.endswith('.bias'): | |||||
| # all bias not using weight decay | |||||
| # print('no decay:{}'.format(parameter_name)) | |||||
| no_decay_params.append(x) | |||||
| elif parameter_name.endswith('.gamma'): | |||||
| # bn weight bias not using weight decay, be carefully for now x not include BN | |||||
| # print('no decay:{}'.format(parameter_name)) | |||||
| no_decay_params.append(x) | |||||
| elif parameter_name.endswith('.beta'): | |||||
| # bn weight bias not using weight decay, be carefully for now x not include BN | |||||
| # print('no decay:{}'.format(parameter_name)) | |||||
| no_decay_params.append(x) | |||||
| else: | |||||
| decay_params.append(x) | |||||
| return [{'params': no_decay_params, 'weight_decay': 0.0}, {'params': decay_params}] | |||||
| if cfg.is_dynamic_loss_scale: | |||||
| cfg.loss_scale = 1 | |||||
| opt = Momentum(params=get_param_groups(net), | |||||
| learning_rate=Tensor(lr), | |||||
| momentum=cfg.momentum, | |||||
| weight_decay=cfg.weight_decay, | |||||
| loss_scale=cfg.loss_scale) | |||||
| if not cfg.use_label_smooth: | |||||
| cfg.label_smooth_factor = 0.0 | |||||
| loss = nn.SoftmaxCrossEntropyWithLogits(sparse=True, reduction="mean", | |||||
| smooth_factor=cfg.label_smooth_factor, num_classes=cfg.num_classes) | |||||
| if cfg.is_dynamic_loss_scale == 1: | |||||
| loss_scale_manager = DynamicLossScaleManager(init_loss_scale=65536, scale_factor=2, scale_window=2000) | |||||
| else: | |||||
| loss_scale_manager = FixedLossScaleManager(cfg.loss_scale, drop_overflow_update=False) | |||||
| if device_target == "Ascend": | |||||
| model = Model(net, loss_fn=loss, optimizer=opt, metrics={'acc'}, | |||||
| amp_level="O2", keep_batchnorm_fp32=False, loss_scale_manager=loss_scale_manager) | |||||
| ckpt_save_dir = "./" | |||||
| else: # GPU | |||||
| model = Model(net, loss_fn=loss, optimizer=opt, metrics={'acc'}, | |||||
| amp_level="O2", keep_batchnorm_fp32=True, loss_scale_manager=loss_scale_manager) | |||||
| ckpt_save_dir = "./ckpt_" + str(get_rank()) + "/" | |||||
| config_ck = CheckpointConfig(save_checkpoint_steps=batch_num * 5, keep_checkpoint_max=cfg.keep_checkpoint_max) | config_ck = CheckpointConfig(save_checkpoint_steps=batch_num * 5, keep_checkpoint_max=cfg.keep_checkpoint_max) | ||||
| time_cb = TimeMonitor(data_size=batch_num) | time_cb = TimeMonitor(data_size=batch_num) | ||||
| ckpoint_cb = ModelCheckpoint(prefix="train_googlenet_cifar10", directory="./", config=config_ck) | |||||
| ckpoint_cb = ModelCheckpoint(prefix="train_googlenet_" + args_opt.dataset_name, directory=ckpt_save_dir, | |||||
| config=config_ck) | |||||
| loss_cb = LossMonitor() | loss_cb = LossMonitor() | ||||
| model.train(cfg.epoch_size, dataset, callbacks=[time_cb, ckpoint_cb, loss_cb]) | model.train(cfg.epoch_size, dataset, callbacks=[time_cb, ckpoint_cb, loss_cb]) | ||||
| print("train success") | print("train success") | ||||